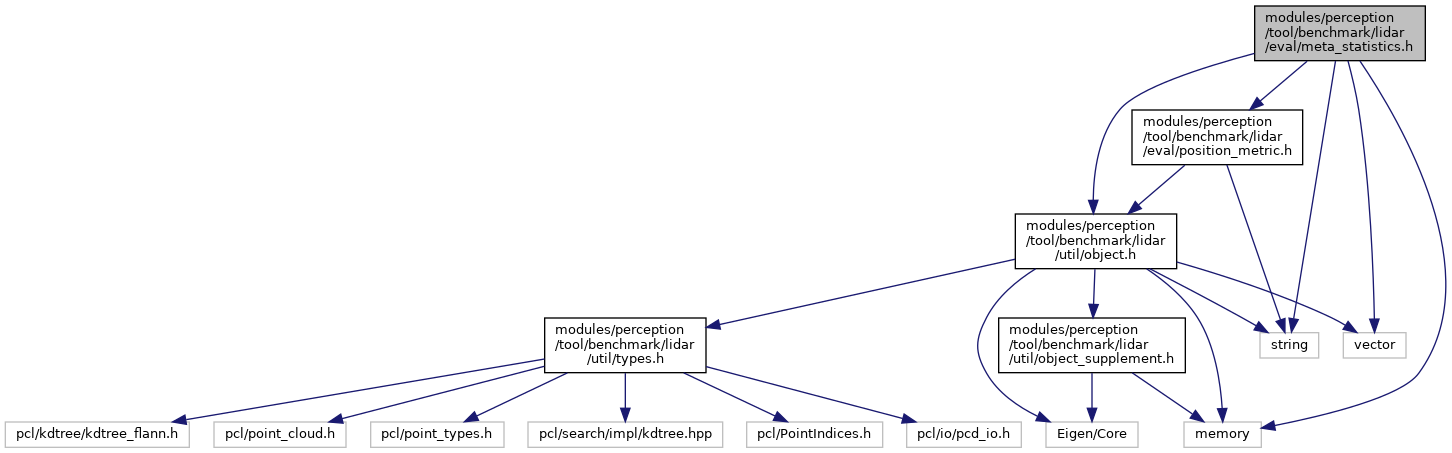
#include <memory>#include <string>#include <vector>#include "modules/perception/tool/benchmark/lidar/eval/position_metric.h"#include "modules/perception/tool/benchmark/lidar/util/object.h"
Include dependency graph for meta_statistics.h:
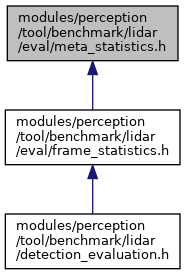
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | apollo::perception::benchmark::SPRCTuple |
| struct | apollo::perception::benchmark::OrientationSimilarityMetric |
| class | apollo::perception::benchmark::MetaStatistics |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::benchmark | |
Functions | |
| void | apollo::perception::benchmark::compute_ap_aos (const std::vector< unsigned int > &cumulated_match_num_per_conf, const std::vector< unsigned int > &cumulated_detection_num_per_conf, const unsigned int total_gt_num, const unsigned int recall_dim, double *ap, std::vector< SPRCTuple > *tuples, const std::vector< double > &cumulated_orientation_similarity_per_conf=std::vector< double >(), double *aos=nullptr) |
