#include <atomic>#include <functional>#include <mutex>#include <string>#include "fastrtps/Domain.h"#include "fastrtps/attributes/PublisherAttributes.h"#include "fastrtps/attributes/SubscriberAttributes.h"#include "fastrtps/participant/Participant.h"#include "fastrtps/publisher/Publisher.h"#include "fastrtps/subscriber/Subscriber.h"#include "cyber/base/signal.h"#include "cyber/proto/topology_change.pb.h"#include "cyber/service_discovery/communication/subscriber_listener.h"
Include dependency graph for manager.h:

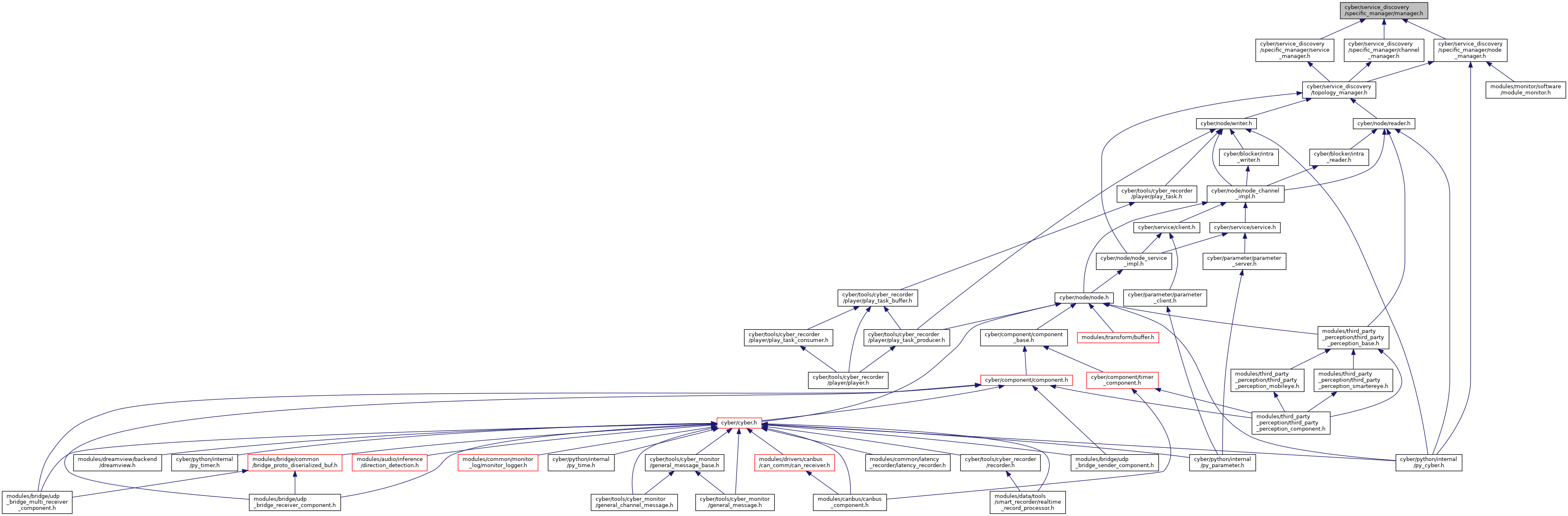
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::cyber::service_discovery::Manager |
| Base class for management of Topology elements. Manager can Join/Leave the Topology, and Listen the topology change. More... | |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
| apollo::cyber::service_discovery | |
