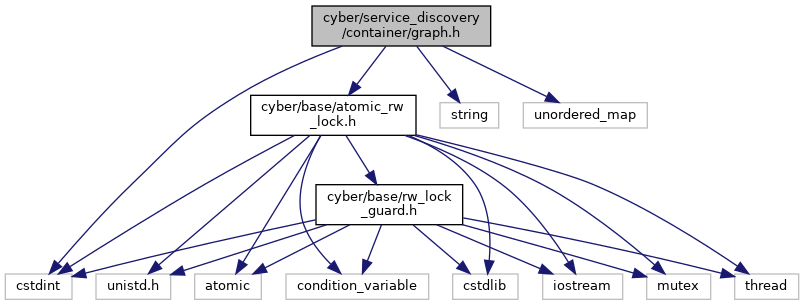
#include <cstdint>#include <string>#include <unordered_map>#include "cyber/base/atomic_rw_lock.h"
Include dependency graph for graph.h:
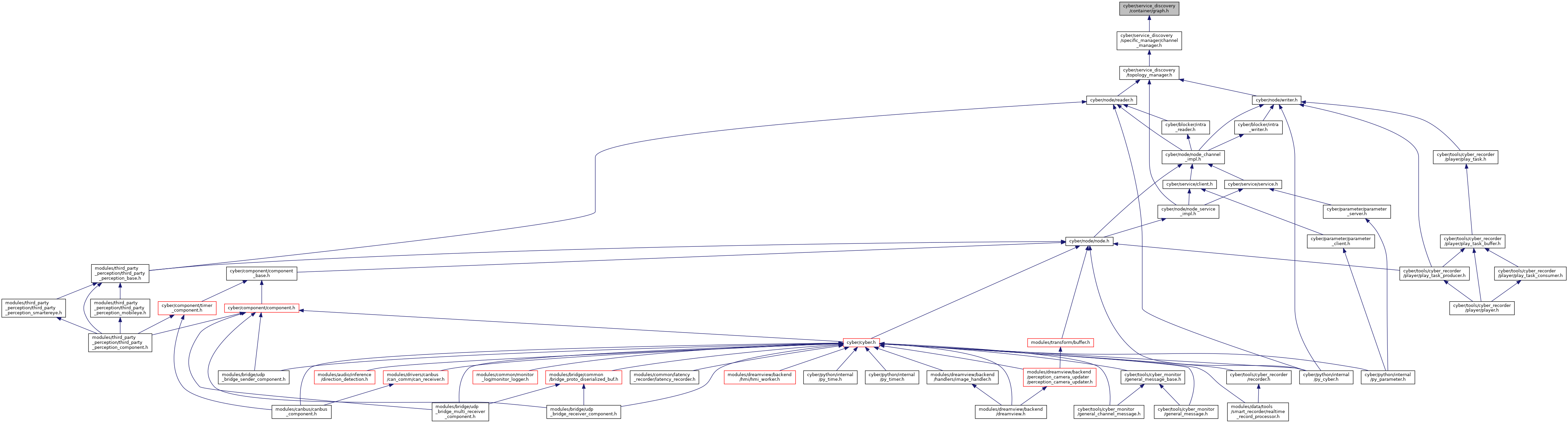
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | apollo::cyber::service_discovery::Vertice |
| class | apollo::cyber::service_discovery::Edge |
| class | apollo::cyber::service_discovery::Graph |
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::cyber | |
| apollo::cyber::service_discovery | |
Enumerations | |
| enum | apollo::cyber::service_discovery::FlowDirection { apollo::cyber::service_discovery::UNREACHABLE, apollo::cyber::service_discovery::UPSTREAM, apollo::cyber::service_discovery::DOWNSTREAM } |
| describe the flow direction between nodes As the DAG below A-—>B--—>C<--—D GetDirectionOf(A, B) is UPSTREAM GetDirectionOf(C, A) is DOWNSTREAM GetDirectionOf(D, A) is UNREACHABLE GetDirectionOf(A, D) is UNREACHABLE More... | |
