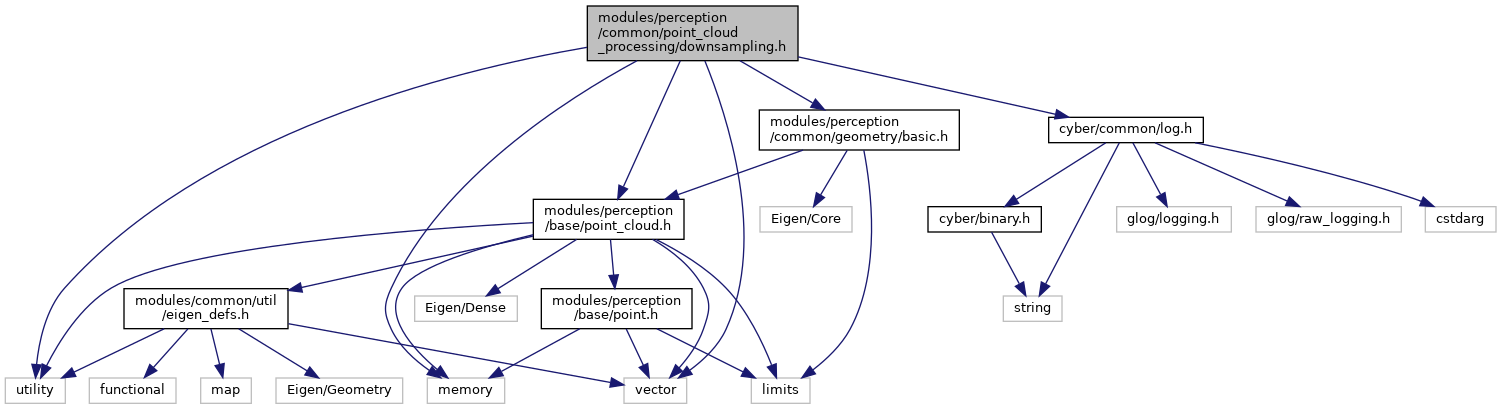
#include <memory>#include <utility>#include <vector>#include "cyber/common/log.h"#include "modules/perception/base/point_cloud.h"#include "modules/perception/common/geometry/basic.h"
Include dependency graph for downsampling.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::common | |
Functions | |
| template<typename PointT > | |
| void | apollo::perception::common::DownsamplingCircular (const PointT ¢er_pt, float radius, float neighbour_dist, typename std::shared_ptr< const base::PointCloud< PointT >> cloud, typename std::shared_ptr< base::PointCloud< PointT >> down_cloud) |
| template<typename PointT > | |
| void | apollo::perception::common::DownsamplingCircularOrgAll (const PointT ¢er_pt, int smp_ratio, float radius, int velodyne_model, typename std::shared_ptr< const base::PointCloud< PointT >> cloud, typename std::shared_ptr< base::PointCloud< PointT >> down_cloud) |
| template<typename PointT > | |
| void | apollo::perception::common::DownsamplingCircularOrgPartial (const PointT ¢er_pt, int org_num, int smp_ratio, float radius, int velodyne_model, const typename std::shared_ptr< const base::PointCloud< PointT >> cloud, typename std::shared_ptr< base::PointCloud< PointT >> down_cloud, std::vector< std::pair< int, int >> *all_org_idx_ptr) |
| template<typename PointT > | |
| void | apollo::perception::common::DownsamplingRectangleOrgPartial (int org_num, int smp_ratio, float front_range, float side_range, int velodyne_model, typename std::shared_ptr< const base::PointCloud< PointT >> cloud, typename std::shared_ptr< base::PointCloud< PointT >> down_cloud, std::vector< std::pair< int, int >> *all_org_idx_ptr) |
| template<typename PointT > | |
| void | apollo::perception::common::DownsamplingRectangleNeighbour (float front_range, float side_range, double max_nei, int velo_model, typename std::shared_ptr< const base::PointCloud< PointT >> cloud, typename std::shared_ptr< base::PointCloud< PointT >> down_cloud) |
