Functions to generate coefficients for digital filter. More...
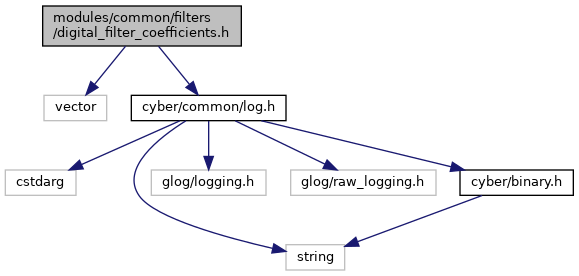
Include dependency graph for digital_filter_coefficients.h:
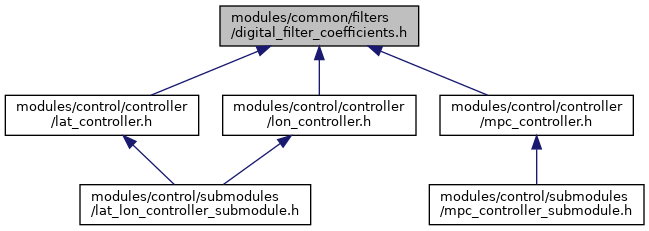
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo::common | |
| apollo::common | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
Functions | |
| void | apollo::common::LpfCoefficients (const double ts, const double cutoff_freq, std::vector< double > *denominators, std::vector< double > *numerators) |
| Get low-pass coefficients for digital filter. More... | |
| void | apollo::common::LpFirstOrderCoefficients (const double ts, const double settling_time, const double dead_time, std::vector< double > *denominators, std::vector< double > *numerators) |
| Get first order low-pass coefficients for ZOH digital filter. More... | |
Detailed Description
Functions to generate coefficients for digital filter.
