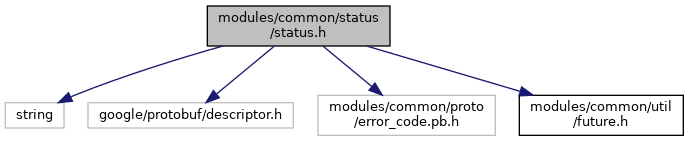
#include <string>#include "google/protobuf/descriptor.h"#include "modules/common/proto/error_code.pb.h"#include "modules/common/util/future.h"
Include dependency graph for status.h:
Go to the source code of this file.
Classes | |
| class | apollo::common::Status |
| A general class to denote the return status of an API call. It can either be an OK status for success, or a failure status with error message and error code enum. More... | |
Namespaces | |
| apollo::common | |
| apollo::common | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
Functions | |
| std::ostream & | apollo::common::operator<< (std::ostream &os, const Status &s) |
