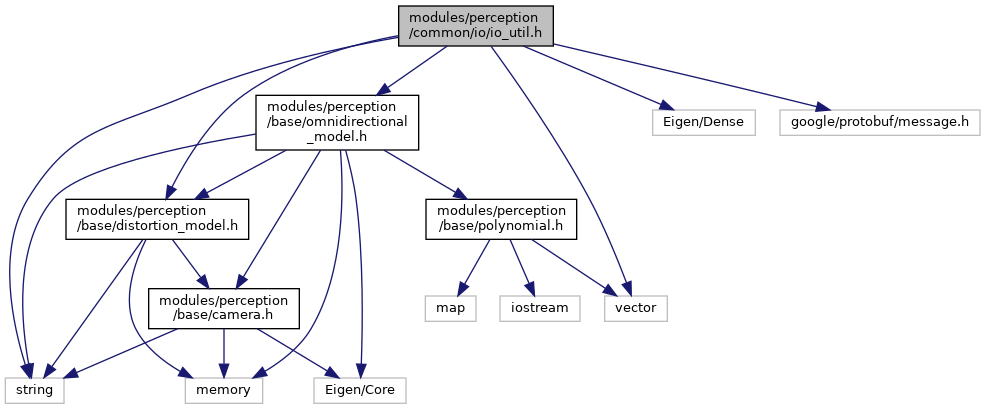
#include <string>#include <vector>#include "Eigen/Dense"#include "google/protobuf/message.h"#include "modules/perception/base/distortion_model.h"#include "modules/perception/base/omnidirectional_model.h"
Include dependency graph for io_util.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::common | |
Functions | |
| bool | apollo::perception::common::ReadPoseFile (const std::string &filename, Eigen::Affine3d *pose, int *frame_id, double *time_stamp) |
| bool | apollo::perception::common::LoadBrownCameraIntrinsic (const std::string &yaml_file, base::BrownCameraDistortionModel *model) |
| bool | apollo::perception::common::LoadOmnidirectionalCameraIntrinsics (const std::string &yaml_file, base::OmnidirectionalCameraDistortionModel *model) |
| bool | apollo::perception::common::GetFileList (const std::string &path, const std::string &suffix, std::vector< std::string > *files) |
