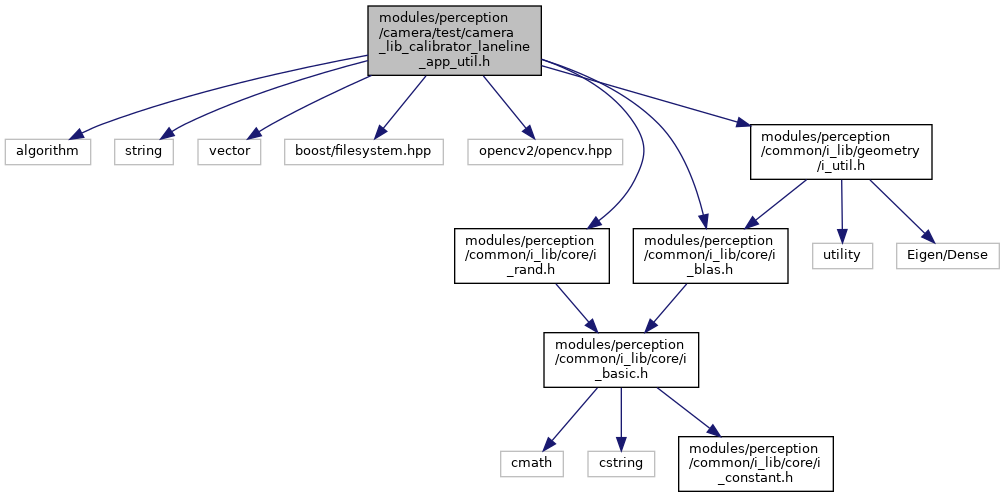
#include <algorithm>#include <string>#include <vector>#include <boost/filesystem.hpp>#include <opencv2/opencv.hpp>#include "modules/perception/common/i_lib/core/i_blas.h"#include "modules/perception/common/i_lib/core/i_rand.h"#include "modules/perception/common/i_lib/geometry/i_util.h"
Include dependency graph for camera_lib_calibrator_laneline_app_util.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| adu | |
| adu::perception | |
| adu::perception::obstacle | |
Functions | |
| bool | adu::perception::obstacle::load_filename (std::string path, std::string suffix, std::vector< std::string > *name_list) |
| bool | adu::perception::obstacle::load_ref_camera_k_mat (const std::string &filename, float k_mat[9], int *w, int *h) |
| void | adu::perception::obstacle::write_text_on_image (cv::Mat *image, float left, float top, const char *text, const CvFont &font, const cv::Scalar &color) |
