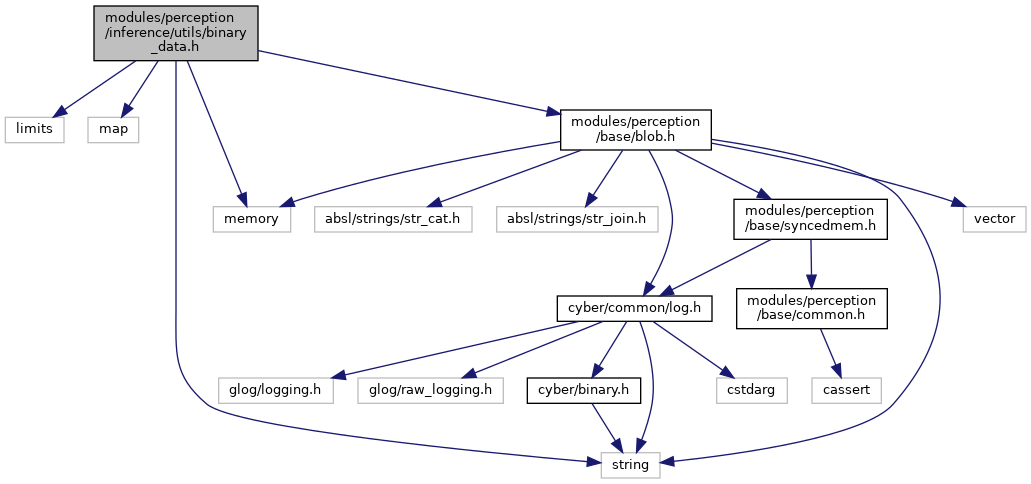
#include <limits>#include <map>#include <memory>#include <string>#include "modules/perception/base/blob.h"
Include dependency graph for binary_data.h:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::inference | |
Functions | |
| size_t | apollo::perception::inference::BinaryReadString (FILE *fp, char *name) |
| size_t | apollo::perception::inference::BinaryWriteString (FILE *fp, const std::string &str) |
| template<typename Dtype > | |
| std::shared_ptr< base::Blob< Dtype > > | apollo::perception::inference::BinaryReadBlob (FILE *fp) |
| template<typename Dtype > | |
| void | apollo::perception::inference::BinaryWriteBlob (FILE *fp, const base::Blob< Dtype > &blob) |
| template<typename Dtype > | |
| std::map< std::string, std::shared_ptr< base::Blob< Dtype > > > | apollo::perception::inference::BinaryReadFile (const char *file_path) |
| template<typename Btype > | |
| bool | apollo::perception::inference::BinaryWriteFile (const char *file_path, const std::map< std::string, Btype > &data_dict) |
Variables | |
| constexpr size_t | apollo::perception::inference::kMaxStrLen = 64 |
| constexpr int | apollo::perception::inference::kMinDim = 1 |
| constexpr int | apollo::perception::inference::kMaxDim = std::numeric_limits<int>::max() |
