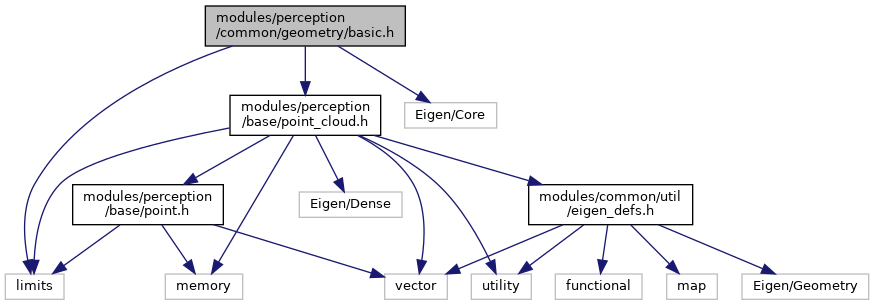
Include dependency graph for basic.h:
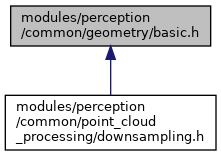
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| apollo | |
| PlanningContext is the runtime context in planning. It is persistent across multiple frames. | |
| apollo::perception | |
| apollo::perception | |
| apollo::perception::common | |
Functions | |
| template<typename Type > | |
| Type | apollo::perception::common::CrossProduct (const Eigen::Matrix< Type, 2, 1 > &point1, const Eigen::Matrix< Type, 2, 1 > &point2, const Eigen::Matrix< Type, 2, 1 > &point3) |
| template<typename PointT > | |
| PointT::Type | apollo::perception::common::CrossProduct (const PointT &point1, const PointT &point2, const PointT &point3) |
| template<typename PointT > | |
| PointT::Type | apollo::perception::common::CalculateEuclidenDist (const PointT &pt1, const PointT &pt2) |
| template<typename PointT > | |
| PointT::Type | apollo::perception::common::CalculateEuclidenDist2DXY (const PointT &pt1, const PointT &pt2) |
| template<typename T > | |
| T | apollo::perception::common::CalculateCosTheta2DXY (const Eigen::Matrix< T, 3, 1 > &v1, const Eigen::Matrix< T, 3, 1 > &v2) |
| template<typename T > | |
| T | apollo::perception::common::CalculateTheta2DXY (const Eigen::Matrix< T, 3, 1 > &v1, const Eigen::Matrix< T, 3, 1 > &v2) |
| template<typename T > | |
| Eigen::Matrix< T, 3, 3 > | apollo::perception::common::CalculateRotationMat2DXY (const Eigen::Matrix< T, 3, 1 > &v1, const Eigen::Matrix< T, 3, 1 > &v2) |
| template<typename T > | |
| Eigen::Matrix< T, 3, 1 > | apollo::perception::common::Calculate2DXYProjectVector (const Eigen::Matrix< T, 3, 1 > &projected_vector, const Eigen::Matrix< T, 3, 1 > &project_vector) |
| template<typename PointT > | |
| void | apollo::perception::common::ConvertCartesiantoPolarCoordinate (const PointT &xyz, typename PointT::Type *h_angle_in_degree, typename PointT::Type *v_angle_in_degree, typename PointT::Type *dist) |
